Projet-ROB3 Fatoumata, Pierre, Arthur, Jules, Antoine et Noah
Cahier du jour 06/02/2025:
Activités du jour
Brainstorming et conception
Nous avons débuté la journée par une session de brainstorming afin de définir l'apparence et les fonctionnalités de notre robot en nous basant sur le cahier des charges.
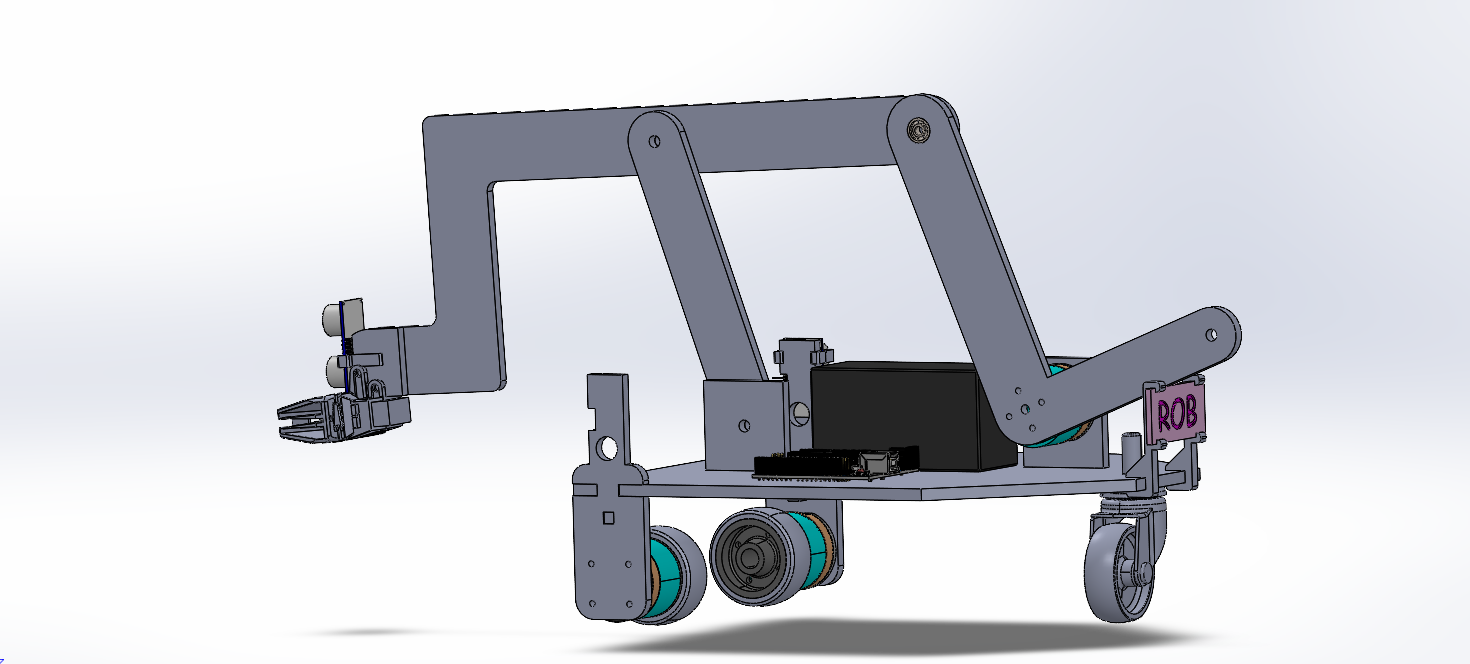
Nous avons opté pour une conception rectangulaire avec deux roues principales et une roue folle à l’arrière. Le robot sera équipé de deux capteurs ultrasons pour mesurer des distances :
-
Un capteur sur la pince.
-
Un capteur sur le côté droit du robot est aligné à l'essieu des roues motrices.
Pierre et Antoine sont chargés de réaliser les premiers travaux de CAO (Conception Assistée par Ordinateur), incluant la modélisation du robot et châssis ainsi que la définition de ses dimensions.
Développement informatique
Côté informatique, nous avons décidé d’implémenter un système odométrique permettant de suivre les coordonnées du robot en temps réel. Ce système prend en compte :
-
La position en X et Y.
-
L’orientation angulaire du robot.
L’algorithme correspondant a été établi dans un premier temps par Jules et Noah il permettra de déterminer et ajuster la position du robot en fonction des données captées.
Dans l’algorithme les différents comportements seront liés, la recherche des positions des balises se fera en même temps que le trajet vers la pièce à prendre, puis la recherche de la troisième balise se fera en même temps que le transport de l’objet vers la zone de dépôt.
Arthur a fait le lien entre la partie mécanique et informatique.
Fatoumata également et s'est chargée de la rédaction du wiki et du diagramme de Gantt
Répartitions des rôles
-
Responsable informatique : Noah(prend un capteur cette semaine)
-
Responsable électronique: Noah
-
Responsable mécanique :Pierre
-
Responsable wiki: Fatoumata
-
Chef de projet: Arthur
Prochaines étapes
-
Débuter la modélisation CAO.
-
Se renseigner sur l'odométrie.
-
tester le matériel électronique.
Cahier du jour 20/02/2025:
Activités du jour
Mécanique
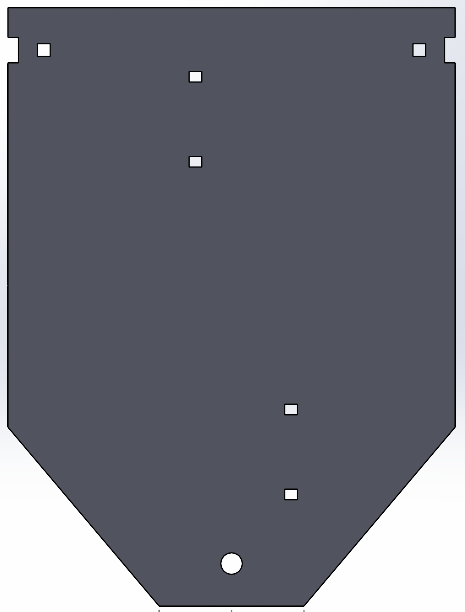
- Châssis modélisé :

- Utilisation de la découpeuse laser Trotec Speedy 100.
- Récupération d’une planche MDF de 6 mm auprès du FabLab et découpe du châssis avec la découpeuse laser.
Malheureusement, il y a eu un petit défaut : le laser de découpe n’est pas allé assez loin dans la planche. (NB: A posteriori, le problème venait de la planche qui était légèrement trop grande, nous n'avons eu des problèmes que sur cette planche et on a eu le même problème de découpe pour d'autres pièces que le châssis) Il faudra ré-usiner le châssis au même endroit pour finir la coupe.
Informatique
- Test du capteur et du moteur.
- Compréhension du pilotage des moteurs en fonction de la distance.
- Test du fonctionnement de deux moteurs ensemble ainsi que de leur réponse en fonction d'une distance mesurée.
Cahier du jour - 27/02/2025
Activités du jour
Mécanique
-
Modélisation du robot avec le positionnement des différents objets à placer sur le châssis : Chassis Robot.SLDPRT
-
Début de la conception du bras motorisé : Bras.rar
Informatique
-
Apprentissage de la bibliothèque servo.h pour ouvrir et fermer la pince grâce à Arduino (on peut maintenant faire bouger la pince)
-
Construction de l'algorithme de déplacement grâce à l'odométrie et au comportement du robot
-
Travail sur les codeurs incrémentaux avec les moteurs
Cahier du jour - 13/03/2025:
Activités du jour
Mécanique
-
Modélisation du bras motorisé avec pince, intégration et placement dans le châssis.
-
Ajustement du châssis avec les éléments de mise et de maintient en position.
-
Robot prêt pour l'usinage.
Informatique
-
Écriture des fonctions permettant l’ouverture et la fermeture de la pince.
-
Gestion de trois moteurs simultanément via Arduino.
-
Développement et correction de l’algorithme de déplacement du robot dans l’arène.
Cahier du jour - 27/03/2025:
Activités du jour
Mécanique
-
Réusinage du châssis, en ajoutant des trous pour faire passer les pièces "pattes" et les pièces support moteur du bras. Mais également d'un trou pour faire passer la roue folle (le marquage que nous avions réalisé n'avait pas fonctionné lors du premier usinage) et usinage des pièces complémentaires en MDF 6mm. Usinage à l'aide de la découpeuse laser Trotec Speedy 100.

-
Optimisation de l'utilisation de la matière première, notamment par l'utilisation de chute et de l'optimisation de l'espace sur Inkskape.
-
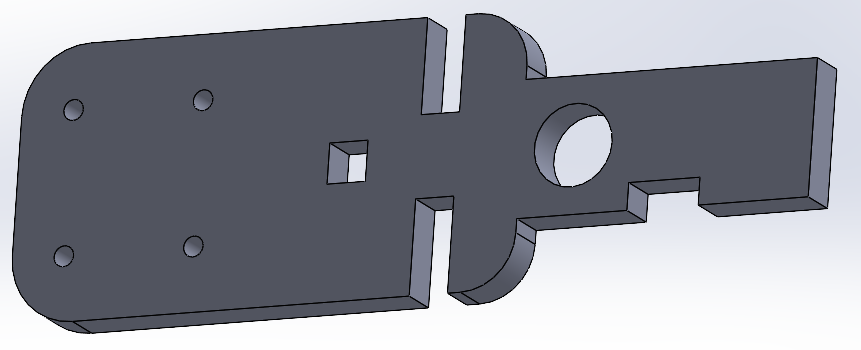
Usinage des pièces support bras/moteur et des pièces pattes : support brasSLDPRT.SLDPRT support moteur.SLDPRT



Informatique
-
Étude du modèle mécanique pour la mise en place de l’odométrie
Cahier du jour - 03/04/2025
Activités du jour
Mécanique
-
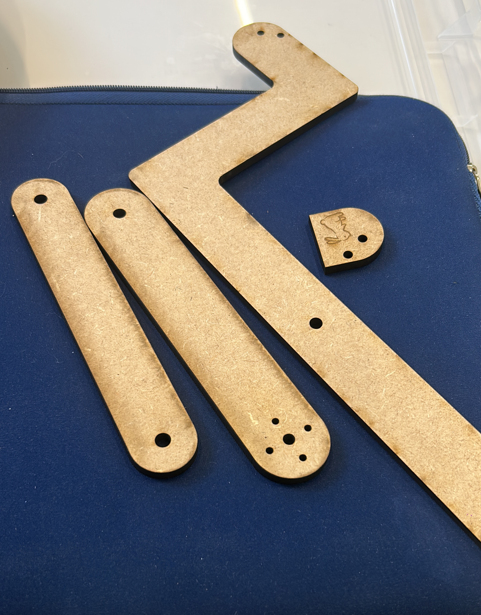
Assemblage des pièces, re-modélisation de la pièce "patte" qui ne convenait plus à l'équipe Informatique et réusinage de celle-ci. Début du premier "roulage" du robot. Usinage du bras de la pince en MDF 6mm. bras1.SLDPRT Bras2.SLDPRT bras3.SLDPRT piece pour pince.SLDPRT

Informatique
-
Codage des différents mouvements possible du robot, modification du code de l'odométrie pour que le robot réel réalise ce que l'on voulait théoriquement.
Électronique :
-
Mise en place de l'électronique de puissance et de commande. Ajout, en accord avec le responsable informatique, d'un bouton "Arrêt" (qui pourra servir dans un autre cas, mais qui sert d'arrêt pour les premières phases de test).
Cahier du jour - 10/04/2025
Activités du jour
Mécanique
- Assemblage des pièces de la pince et collage au châssis, re-modélisation de la pièce "patte" (réusinage de celle-ci) pour y ajouter l'insertion d'une tige et d'un fusible : Piece Roue Patte du Robot.SLDPRT
-
Trou de 5mm réalisés avec une perceuse dans le châssis pour faire passer les fils à l'intérieur.
-
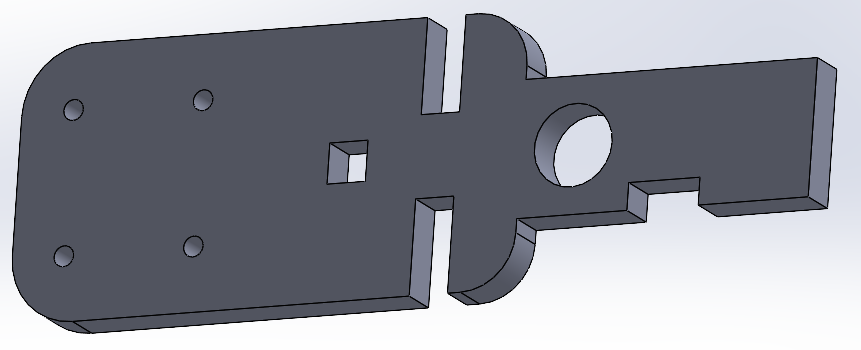
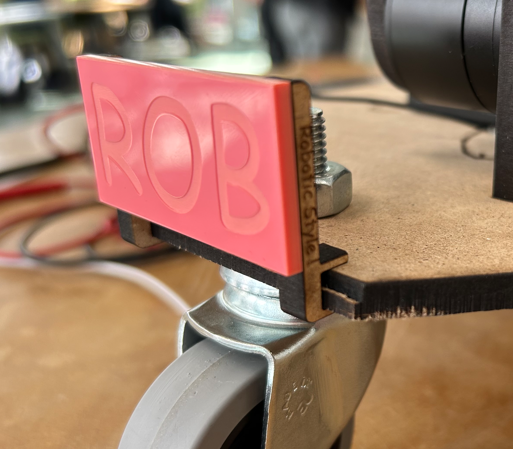
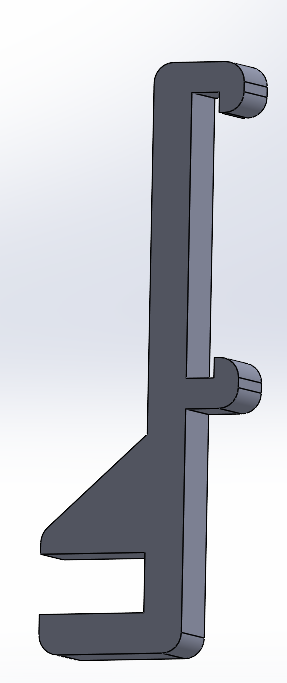
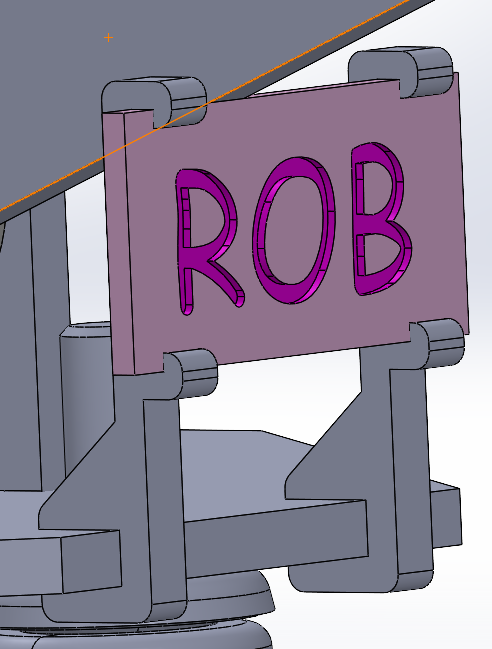
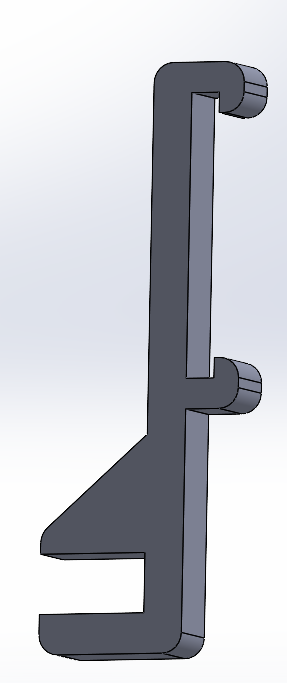
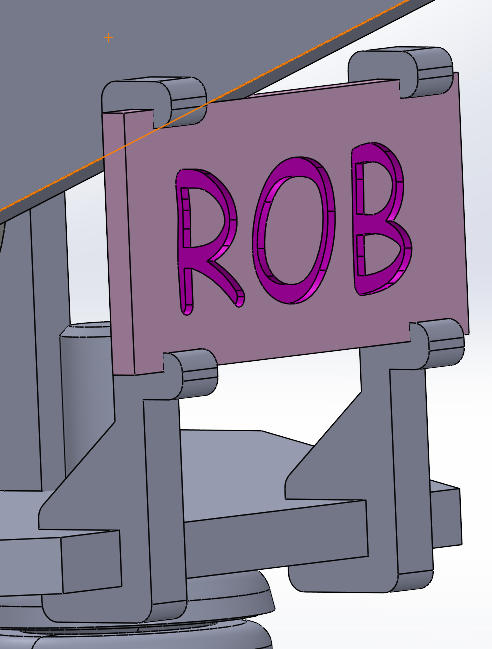
Modélisation d'une petite plaque d'immatriculation et de son support. Usinage du support sur des chutes de MDF et de la plaque dans une chute de PPMA Rose 3mm : plaque d'imatriculation.SLDPRT

-
Découpe, à la scie, d'une petite partie du bras de la pince pour mieux y loger le capteur à ultrason.
-
Gravure d'un QR code ramenant vers cette page du Wiki sur une chute de PPMA Noir 3mm (en utilisant la Trotec Speedy 100). Collage de ce même QR code en dessous du châssis à l'aide de double-face.
-
Collage du capteur à ultrason sur la pièce "patte" et sur la pince à l'aide de double-face. Début du positionnement de la carte Arduino et de la Batterie, fixés au châssis à l'aide de double-face.


Électronique :
-
Réalisation d'un soudage précis sur une plaque de test de l'électronique de puissance pour un meilleur rendu visuel et logistique. Tirage des câbles et connexion de tous les éléments.
Cahier du jour - 21/05/2025
Activités du jour
Mécanique
- Ajout d'une petite pièce qui sert à tenir le capteur. Que ce soit sur la pince ou sur la patte. Elles sont assez fragiles, mais permettent de mieux tenir le capteur tout en étant une solution "plus propre" que du gaffeur.
Pièce_tient_capteur sur la patte : piece pour capteur patte.SLDPRT
-
Pièce_tient_capteur sur la pince : piece pour capteur pince.SLDPRT
-


Cahier du jour - 28/05/2025
Activités du jour
Mécanique
- Le moteur de la pince ne délivrant pas un couple assez important, nous avons décidé de rajouter une excroissance à un des bras du moteur pour y ajouter un contrepoids. Re-modélisation de cette pièce, ajout d'un trou plus gros pour y faire passer un roulement (pour réduire les frottements). Usinage dans une chute de MDF 6mm avec la Trotec Speedy 100 : bras3.SLDPRT

- Cependant, cette solution n'a pas totalement fonctionné, le bras arrivait à partir, mais avait du mal à revenir. Nous avons donc décidé d'ajouter un élastique pour ne plus avoir de problème, la plaque d'immatriculation initialement esthétique servira de buté.
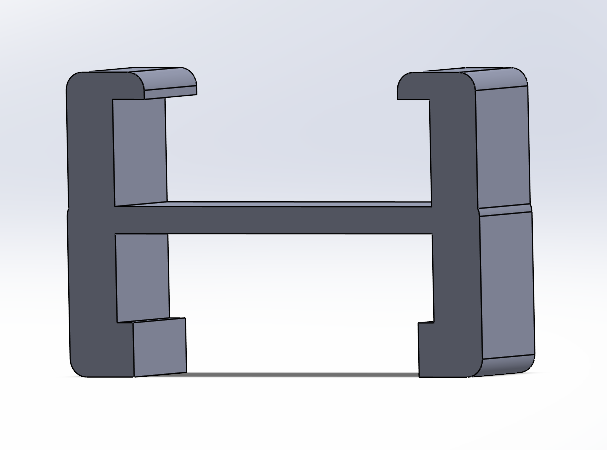
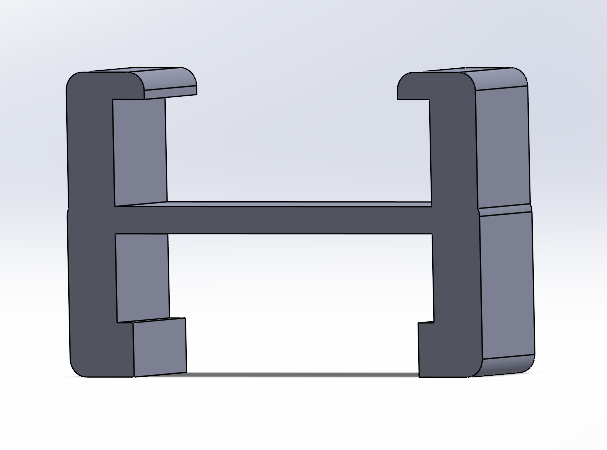
Pour rendre le tout plus solide, nous avons refait les pièces "portes plaques". Piece plaque d'imatriculation.SLDPRT
Électronique
-
Mise en place du câble management.

Informatique
- Le code de l’asservissement du bras est fonctionnel. Le modèle mécanique mis en place permet d’assurer le bon fonctionnement global du bras.
- Les roues glissent lors des virages ce qui fausse l’odométrie, donc nous avons ajouté du scotch double face sur les roues. Il était cependant trop adhésif par rapport au couple moteur donc nous avons dû ajouter de la poussière pour essayer de mieux maîtriser le rapport adhérence/couple moteur.
Cahier du jour - 04/06/2025
Activités du jour
Mécanique:
- Modélisation d'une petite pièce support pour les boutons prévoir et usinage de celle-ci dans une chute de PPMA Orange fluo 3mm & usinage des pièces supports à la plaque d'immatriculation dans une chute de MDF 6mm à l'aide de la Trotec Speedy100 : Piece support boutton poussoir.svg
Résumé générale du projet
L’objectif de ce projet était de concevoir, modéliser, assembler et programmer un robot mobile autonome, capable de :
-
Se déplacer de manière autonome ;
-
Détecter des balises ;
-
Saisir un objet à l’aide d’un bras motorisé ;
-
Transporter cet objet vers une zone de dépôt.
Le travail a été réparti entre les membres de l’équipe, chacun ayant une responsabilité définie (mécanique, électronique, informatique, rédaction wiki, gestion de projet). Cette organisation a favorisé l’autonomie, la coordination et la progression régulière du projet.
Répartition des tâches:
|
NOM |
RÔLES |
TÂCHES RÉALISÉES |
|
ARTHUR |
Chef de projet |
|
|
ANTOINE |
Équipe mécanique |
|
|
NOAH |
Responsable électronique Responsable informatique |
|
|
PIERRE |
Responsable mécanique |
|
|
FATOUMATA |
Responsable wiki / gestion |
|
|
JULES |
Équipe informatique |
|
Pistes d'améliorations :
Lors de ce projet, nous avons rencontré plusieurs difficultés que nous ne sommes pas parvenu à résoudre dans les temps.
- Le principe de l’odométrie repose sur une rotation précise de 90°, calculée en fonction des dimensions des roues et du châssis du robot.
Pour tenter de pallier ce problème, nous avons appliqué du ruban adhésif double face sur les roues, avec de la poussière afin de limiter le couple moteur nécessaire et améliorer temporairement l’adhérence. Cette solution n’a cependant été efficace que durant quelques essais, la poussière ayant rapidement saturé l’adhésif. Ce manque d’adhérence a donc provoqué des erreurs de rotation, compromettant le bon déroulement du projet.
Comme le montre l’une des vidéos en pièce jointe, le capteur atteint parfois le seuil de détection d’une balise avant même de l’avoir croisée en raison d’un défaut de parallélisme du robot par rapport au mur dû à l'erreur de rotation que l'on ne peut pas corriger avec l'odométrie. Il aurait fallut se servir des capteurs pour faire un suivi du mur à distance fixe tout en mettant "en pause" l'odométrie". Même lorsque nous tentons de corriger manuellement la trajectoire en poussant le robot, celui-ci conserve un cap biaisé puisque l’angle θ cible n’est pas modifié. Il convient de noter que ce défaut d’adhérence ne pouvait raisonnablement être anticipé lors de la phase de conception du robot. - Le deuxième problème majeur rencontré concernait des erreurs de communication entre le bus CAN et les moteurs, entraînant des blocages du programme.Ce n’est qu’après la présentation orale que nous avons réussi à contourner partiellement ce dysfonctionnement, après y avoir consacré huit heures supplémentaires (intervention de M. Morel après six heures d’efforts, suivie de deux heures supplémentaires). Bien que le problème persiste encore, il ne bloque désormais plus l’exécution du code, comme le montre la vidéo jointe.
- Une piste d’amélioration plus générale pour le groupe concerne le manque de rigueur dans la phase de conception, qui a été, à tort, reléguée au second plan au profit du bricolage et de solutions improvisées. Cette approche a conduit à des erreurs nécessitant la re-fabrication de certaines pièces, engendrant ainsi des pertes en matériel, en temps et en budget.
- Avec du recul, nous pensons qu’une répartition des tâches moins segmentée aurait été plus efficace, notamment parce que le développement du code nécessitait un accès direct au robot. Une conception plus approfondie en amont aurait permis d’anticiper des problèmes tels que le couple moteur insuffisant ou la distance entre les roues trop faible pour la précision nécessaire à la bonne rotation. Cela nous aurait ensuite permis de travailler ensemble sur la partie informatique, afin que chaque membre du groupe puisse y contribuer. Il aurait été plus pertinent que chacun puisse intervenir sur l’ensemble des aspects du projet, conformément à l’objectif d’apprentissage global du projet (cf. APP).
- Enfin, nous aurions pu améliorer notre organisation en intégrant plus systématiquement des outils de gestion de projet, tels que le diagramme de Gantt, ainsi qu’en instaurant des phases de briefing et de débriefing en début et fin de séance (10 premières et dernières minutes). Par ailleurs, consacrer davantage de temps au brainstorming individuel avant la mise en commun en groupe aurait permis de structurer plus efficacement nos idées.
No Comments