Prototypage Arduino - Rita MATAR, Yasmine HAMED, Maélanne REVOL & Marya EL NOUEIRY
Introduction à Arduino
1. Les outils et leurs utilisations
Avant de commencer à programmer et à monter des circuits avec Arduino, il est essentiel de comprendre les composants de base et leur rôle :
-
LED (Diode électroluminescente) :
- Permet le passage du courant dans un seul sens.
- Possède une patte plus courte correspondant à la borne négative (cathode).
- A une très faible résistance.
-
Résistance :
- Permet de limiter le courant circulant dans un circuit.
- Utilise la loi d’Ohm : U = R × I (U : tension, R : résistance, I : courant).
- La pile peut compenser les variations de courant.
-
Condensateur :
- Stocke et libère l’énergie électrique selon les besoins du circuit.
-
Potentiomètre :
- Permet de faire varier la tension.
- Utilisé pour permettre à l’Arduino d’interagir avec l’utilisateur.
-
Transistor :
- Permet de contrôler des tensions plus élevées avec Arduino.
- Par exemple, un moteur fonctionnant en 12V (trop élevé pour l’Arduino) peut être piloté à l’aide d’un transistor.
-
Régulateur de tension :
- Permet de convertir une tension de 12V en 5V pour adapter l’alimentation des composants.
2. Premiers pas avec Arduino IDE
Pour programmer notre Arduino, nous avons ouvert Arduino IDE et accédé à un exemple de code en suivant ces étapes :
- Ouverture d’un exemple de code Blink :
- Aller dans File > Examples > Basics > Blink.
- Vérifier que la carte Arduino est bien sélectionnée :
- Tools > Board > Arduino AVR > Arduino Uno.
- Tools > Port > Dev CU (sélectionner le premier port détecté).
- Test de la carte Arduino :
- Nous avons d’abord vérifié que l’Arduino fonctionnait correctement en chargeant le programme Blink, qui fait clignoter une LED embarquée.
- Ensuite, nous avons modifié la durée du clignotement en changeant la valeur des délais (de 1000ms à 5000ms).
3. Réalisation des premiers montages
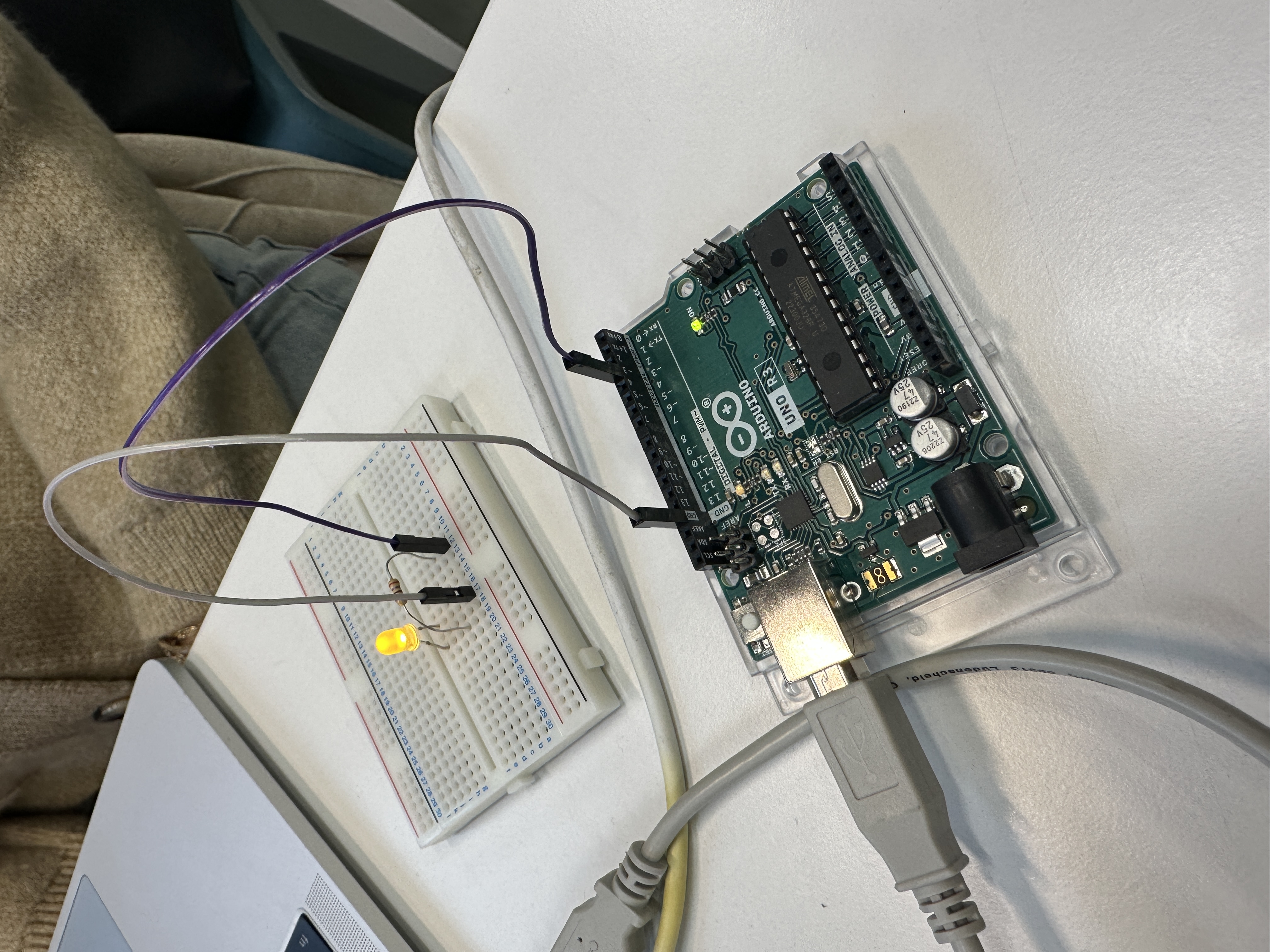
Premier montage : LED clignotante
Nous avons réalisé notre premier circuit en utilisant :
- Une LED.
- Une résistance pour limiter le courant.
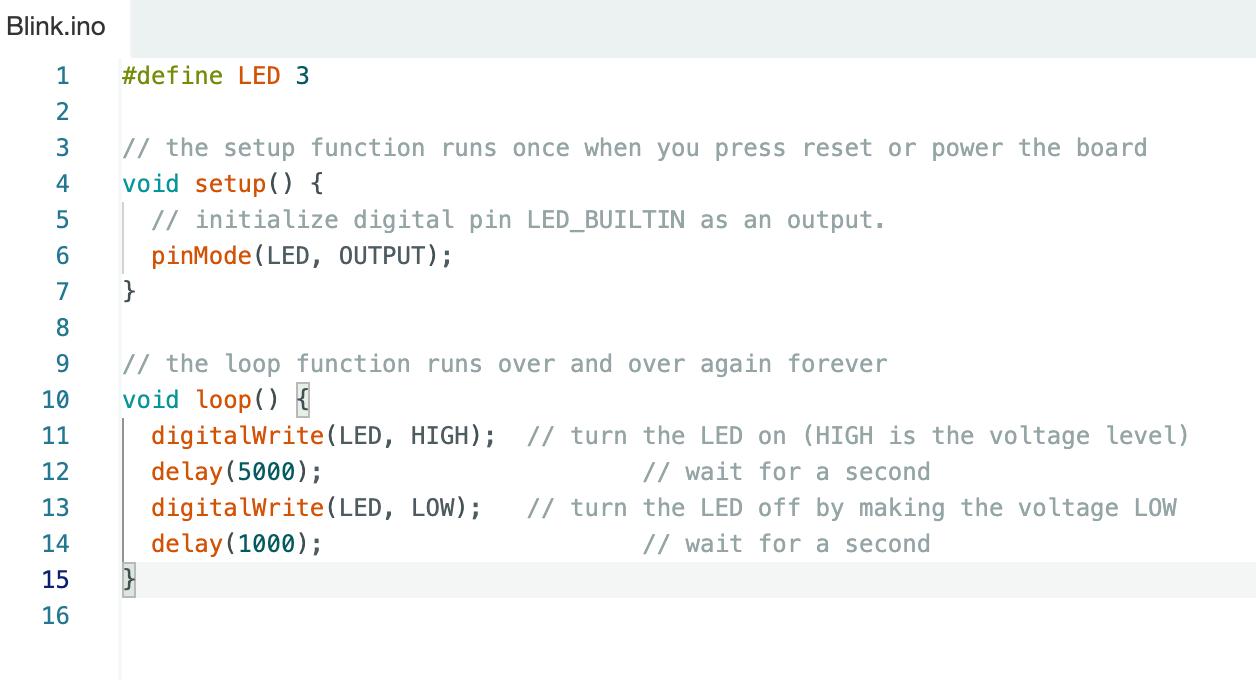
Ensuite, nous avons écrit un programme permettant de faire clignoter la LED.
Il faut mantenant faire le code pour faire glignonté la LED :
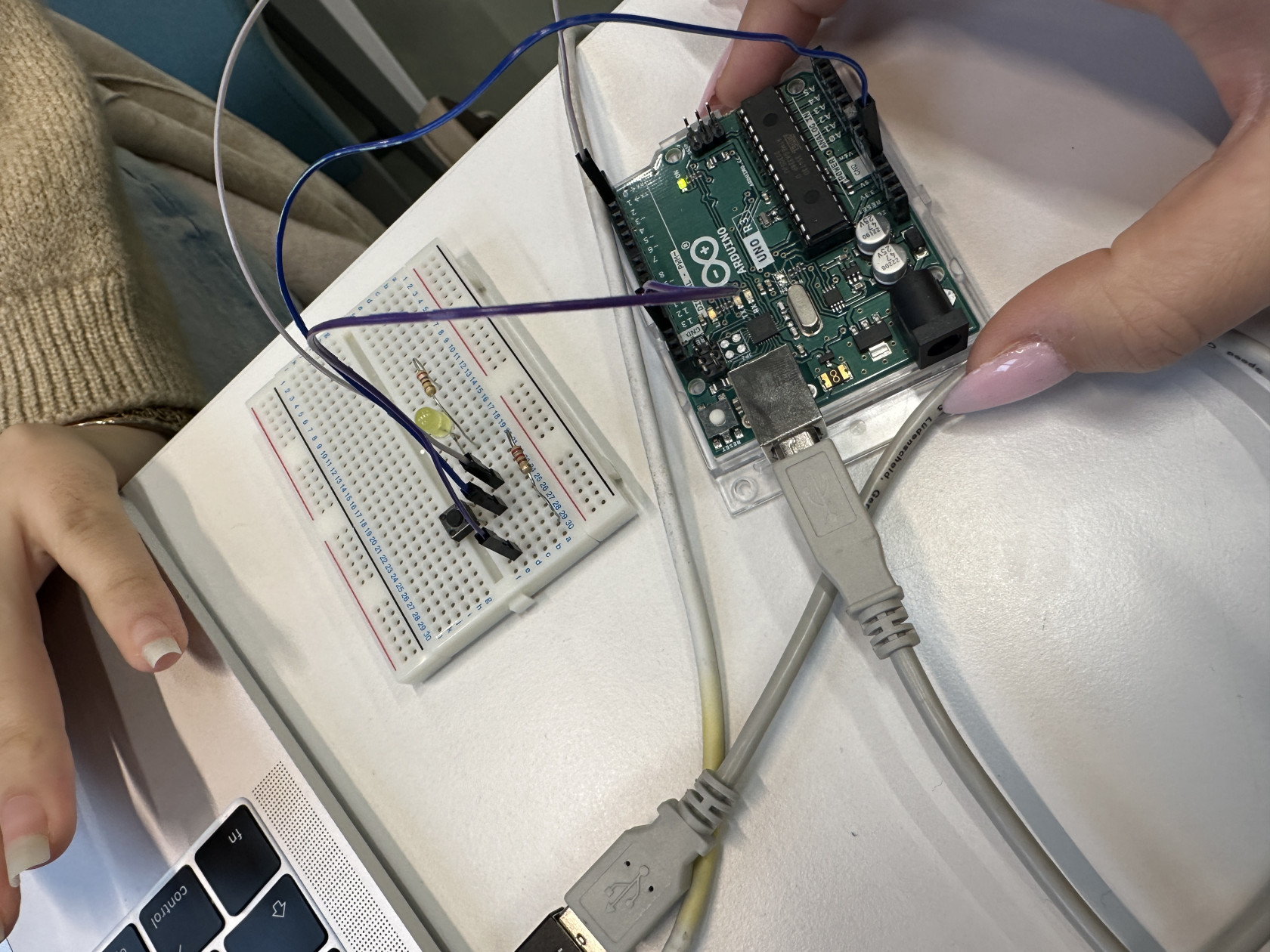
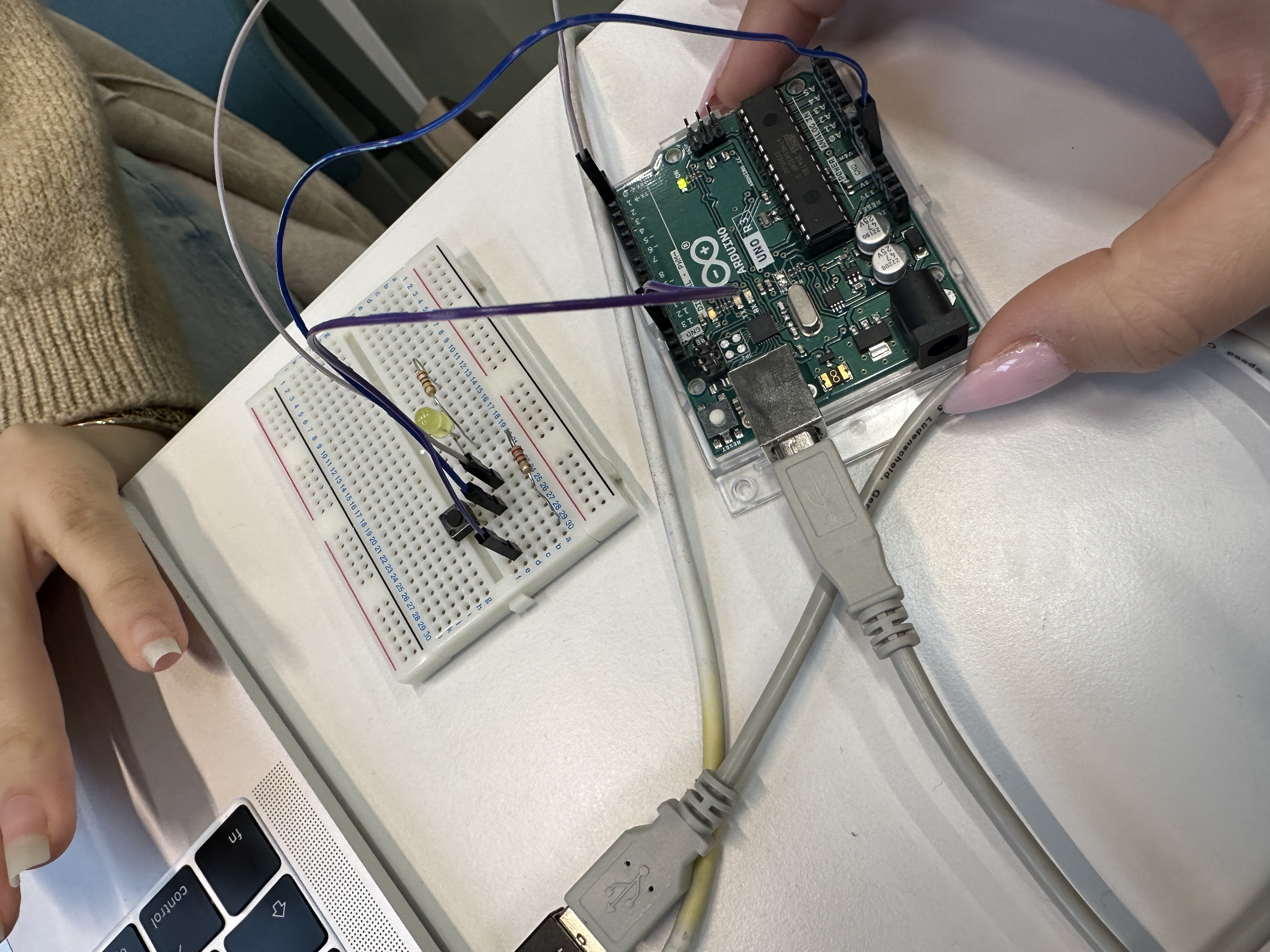
Deuxième montage : Bouton-poussoir
Après avoir appris à faire clignoter une LED, nous avons ajouté un bouton-poussoir alimenté en 5V.
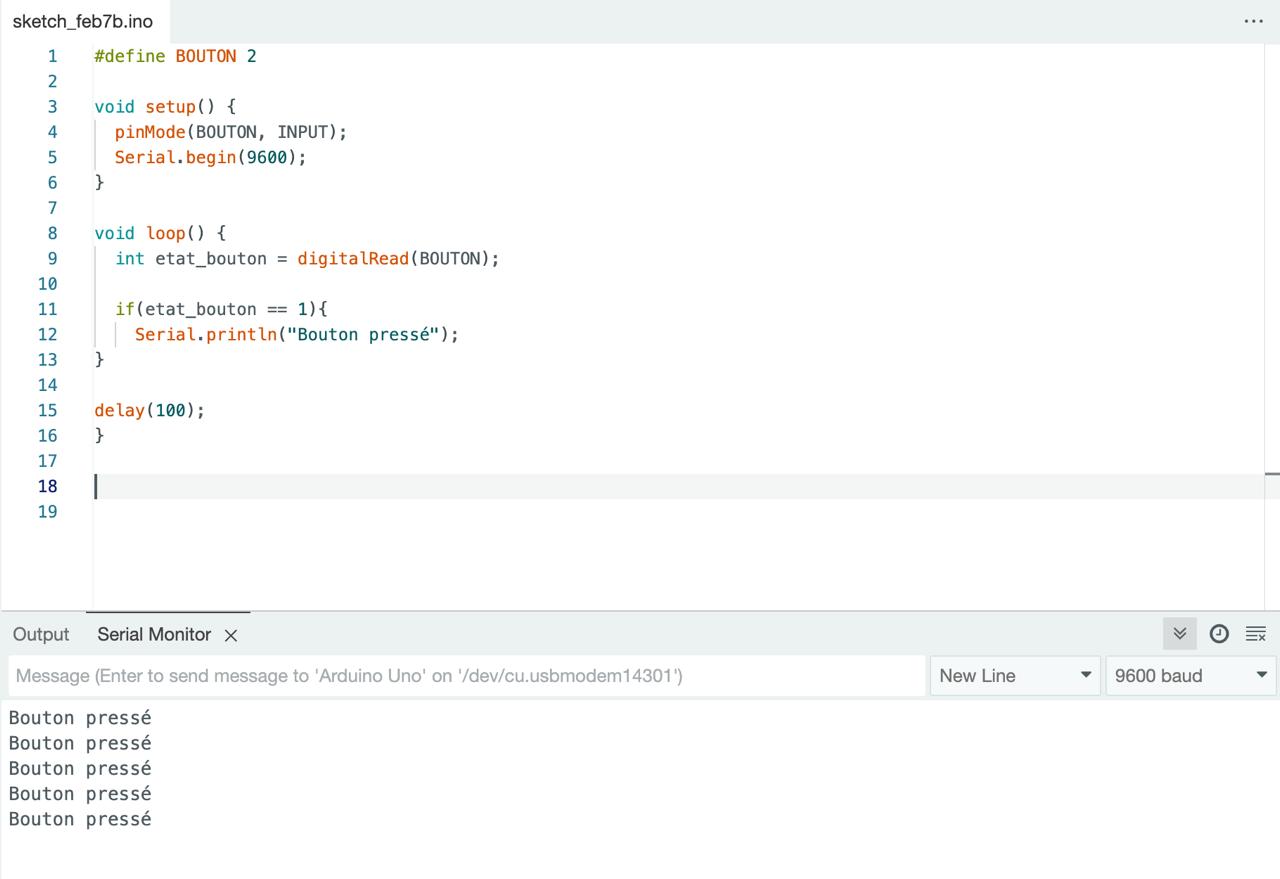
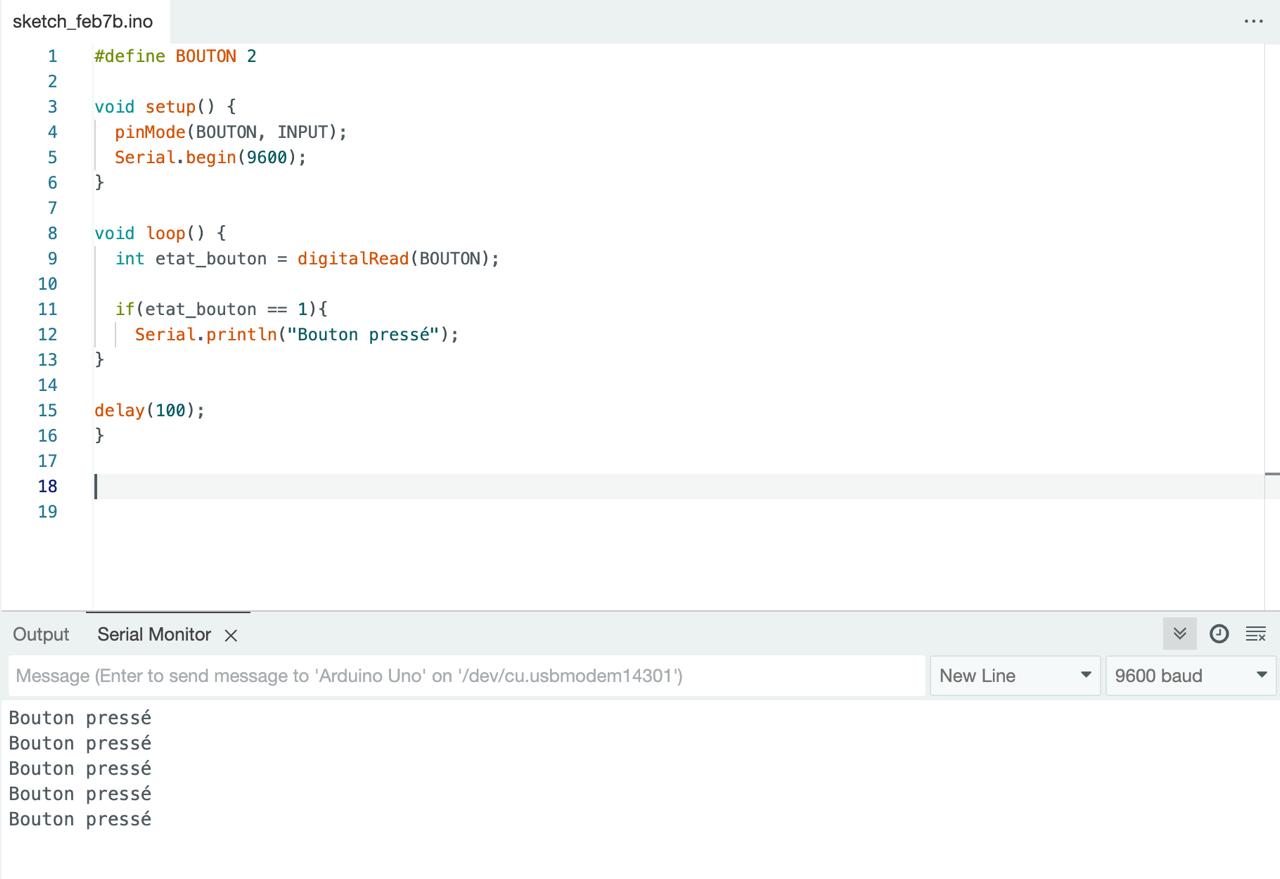
- Nous avons téléversé un programme permettant de détecter l’appui sur le bouton.
- Après l’upload du code, nous avons ouvert le moniteur série :
- Aller dans Tools > Serial Monitor.
- Une fenêtre s’affiche indiquant lorsque le bouton est pressé.
Troisième montage : Potentiomètre
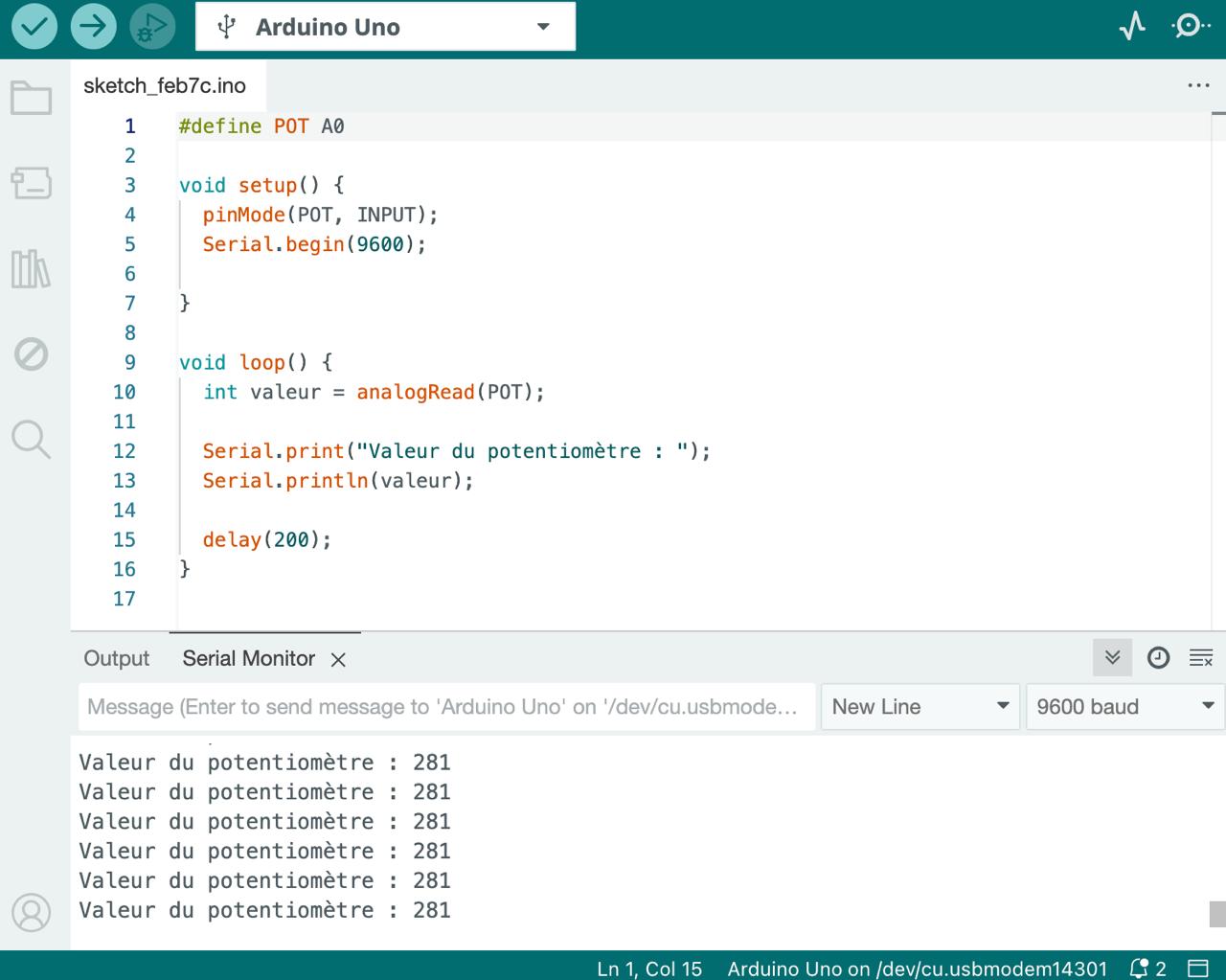
Nous avons ajouté un potentiomètre au circuit.
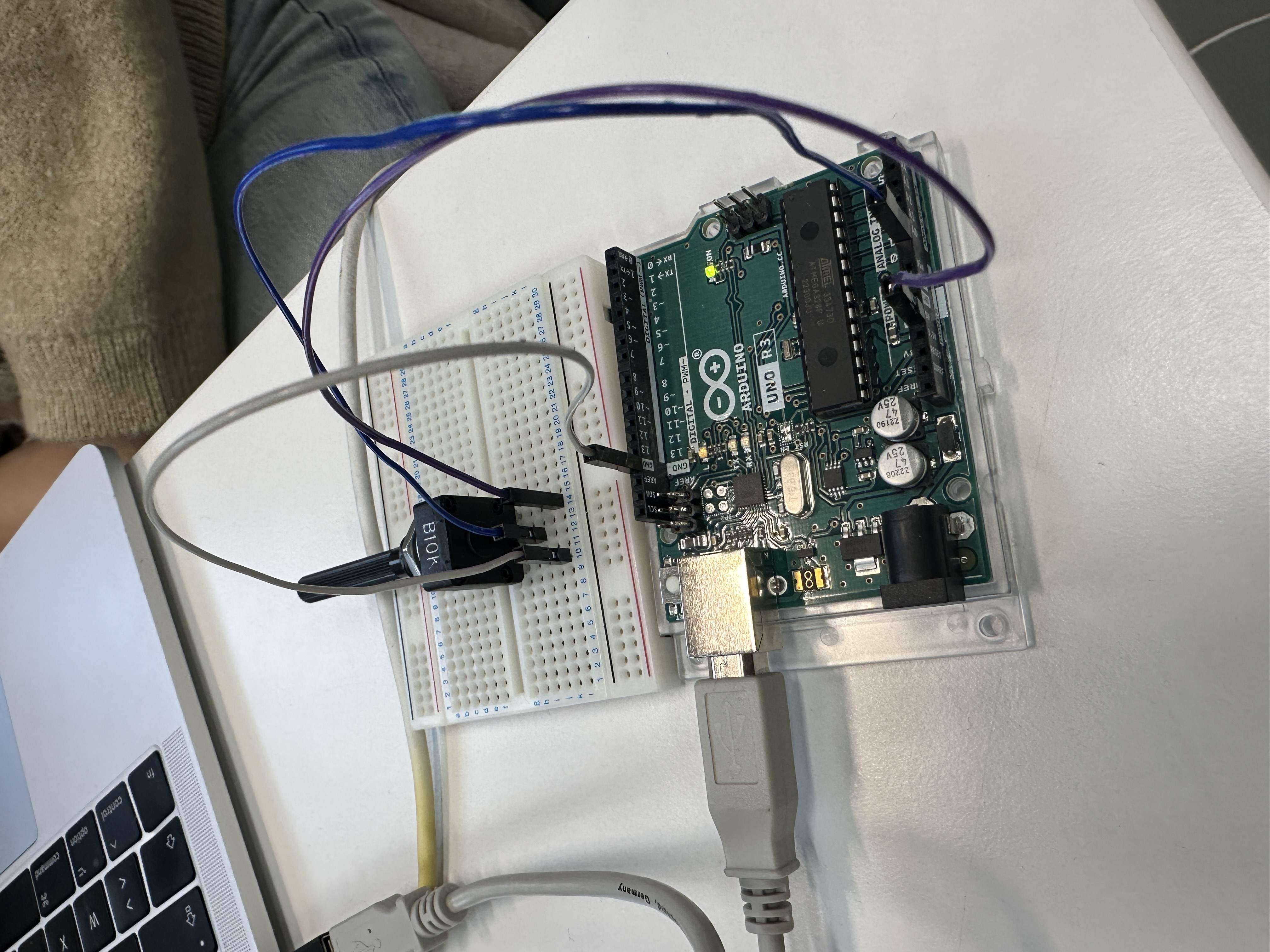
- En tournant le potentiomètre, la tension de sortie varie.
- Cette variation est détectée par l’Arduino et affichée sur le moniteur série.
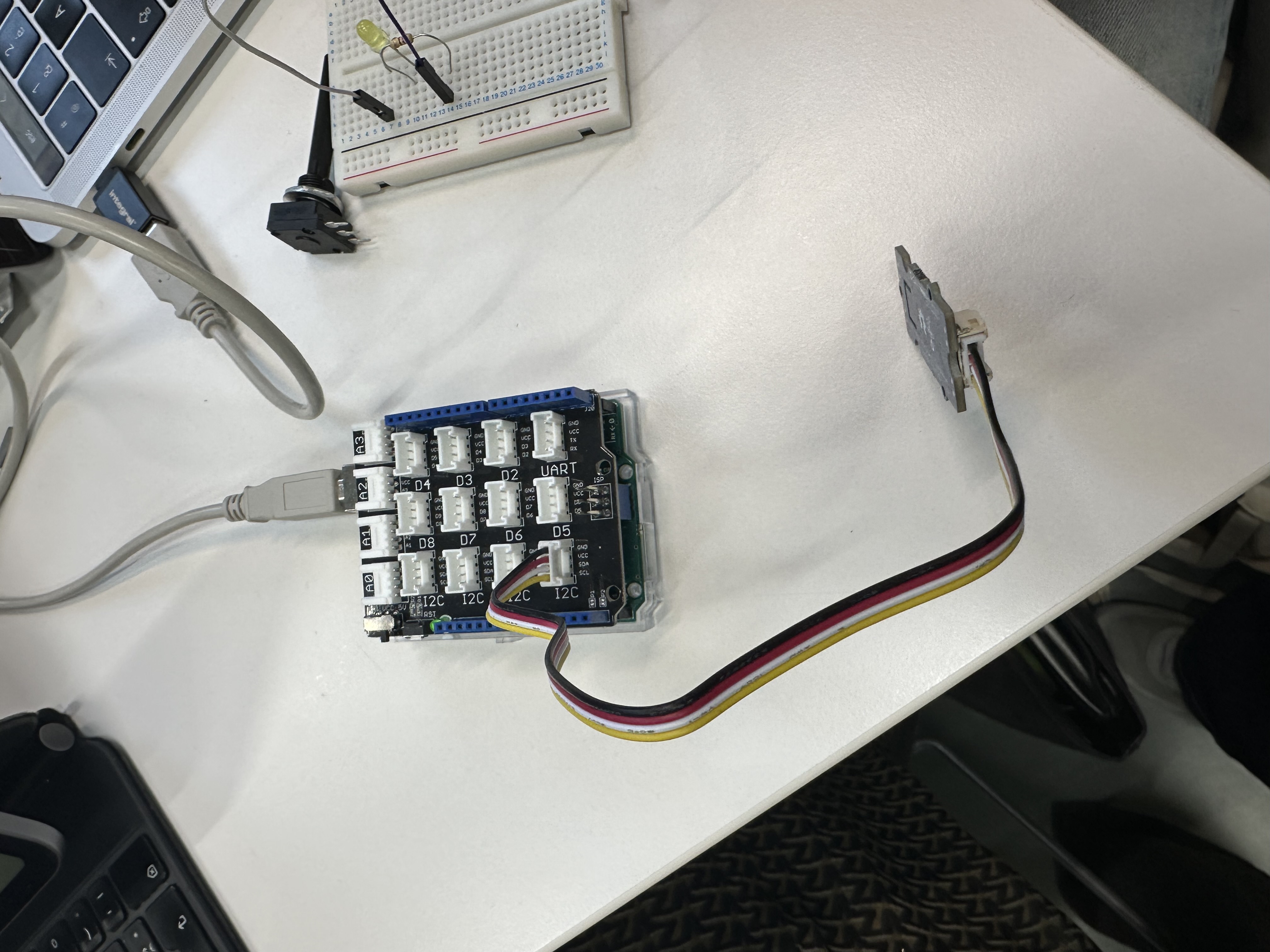
Quatrième montage : Capteur I2C
Nous avons expérimenté l'utilisation d'un capteur communicant en I2C, tel que :
- Un capteur de luminosité.
- Un capteur de température.
- Un capteur d’humidité.
Le branchement des capteurs I2C se fait sur les broches SDA et SCL. Pour connecter ces capteurs, nous avons utilisé un shield qui se place par-dessus la carte Arduino.
Il faut maintenant chercher le code correspondant à notre capteur dans la librairie de l’application Arduino IDE. Dans notre cas, il s’agit du capteur SHT35.
Ci-dessous, le montage du capteur :
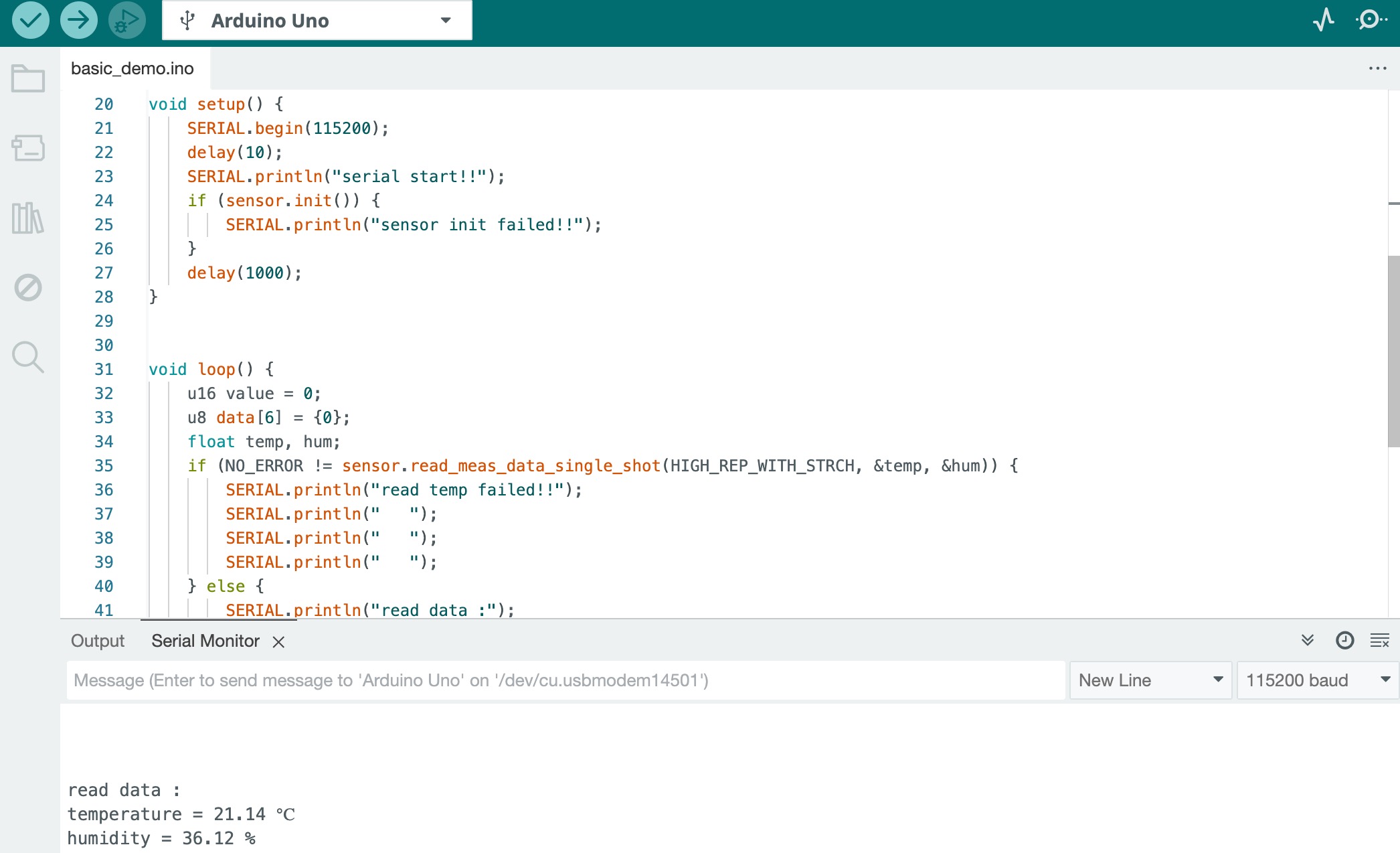
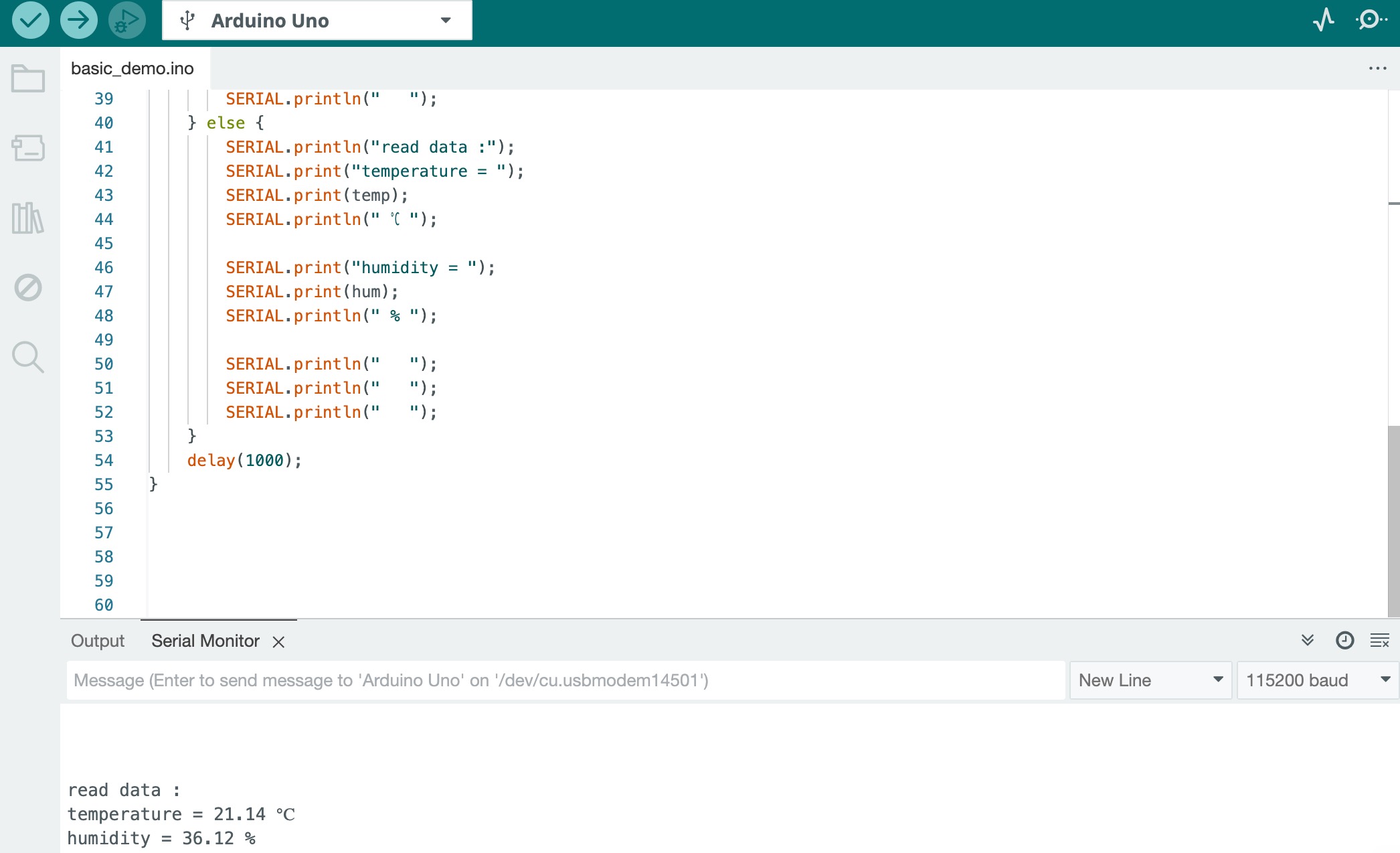
Code correspondant au capteur SHT35:

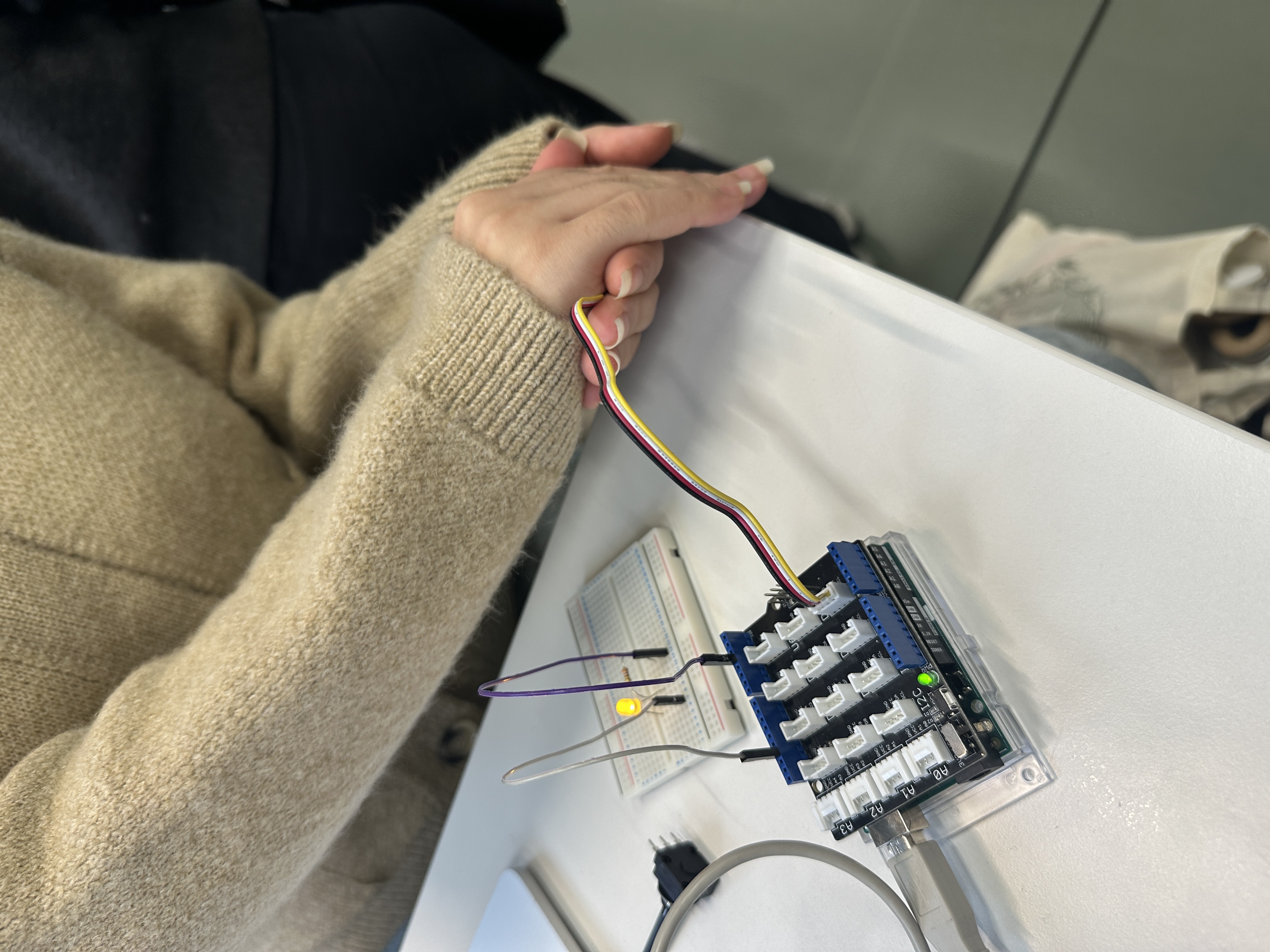
Cinquième montage:
On branche une led ainsi qu’une résistance sur notre montage Arduino, shield et capteur thermique et d’humidité.
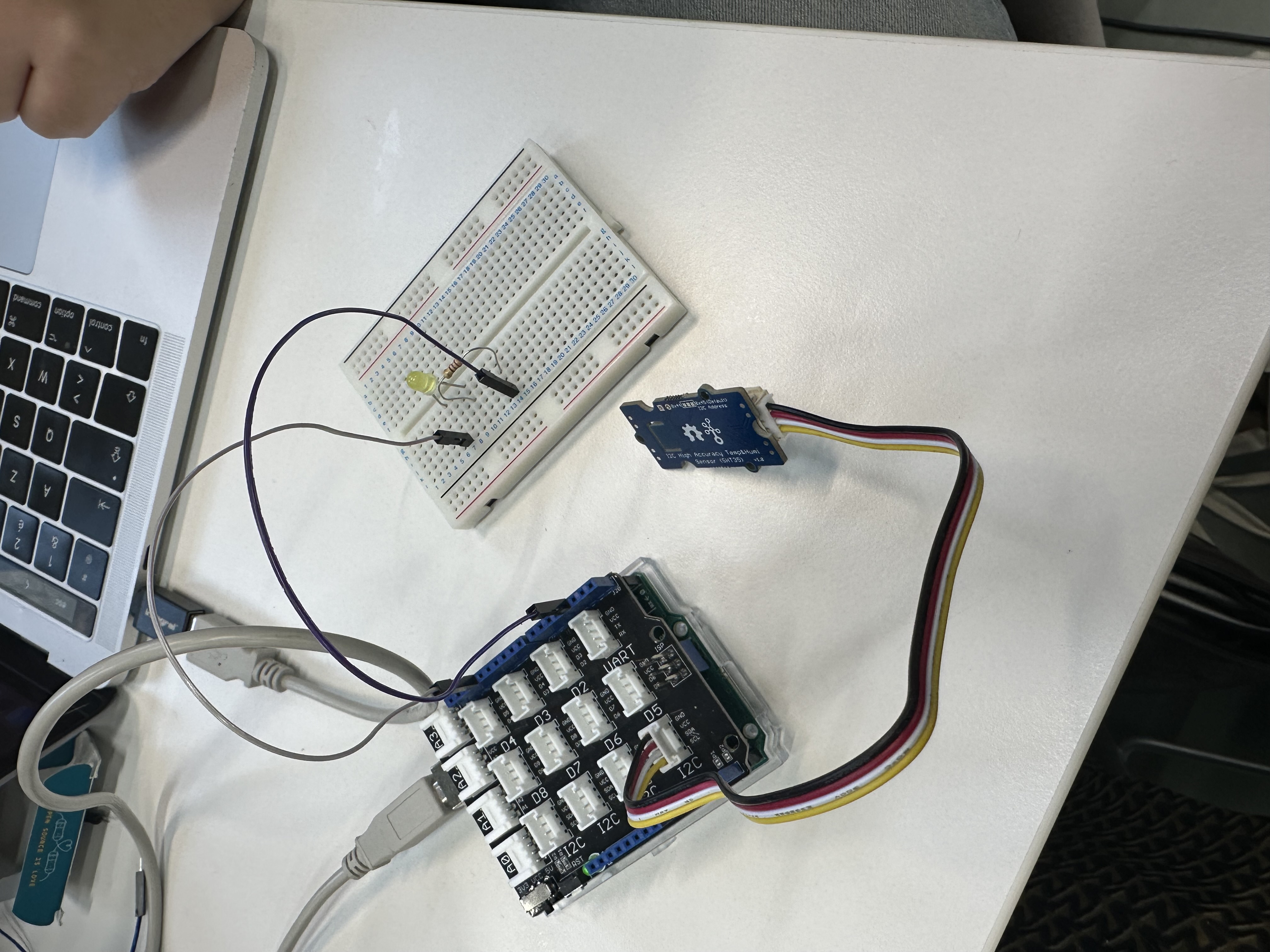
En réchauffant le capteur avec nos mains, on peut faire augmenter la température autour du capteur et ainsi allumer la led (à partir de 23°C). On observe qu’en retirant nos mains, la led s’éteint lorsqu’elle passe en dessous du seuil des 23°C.
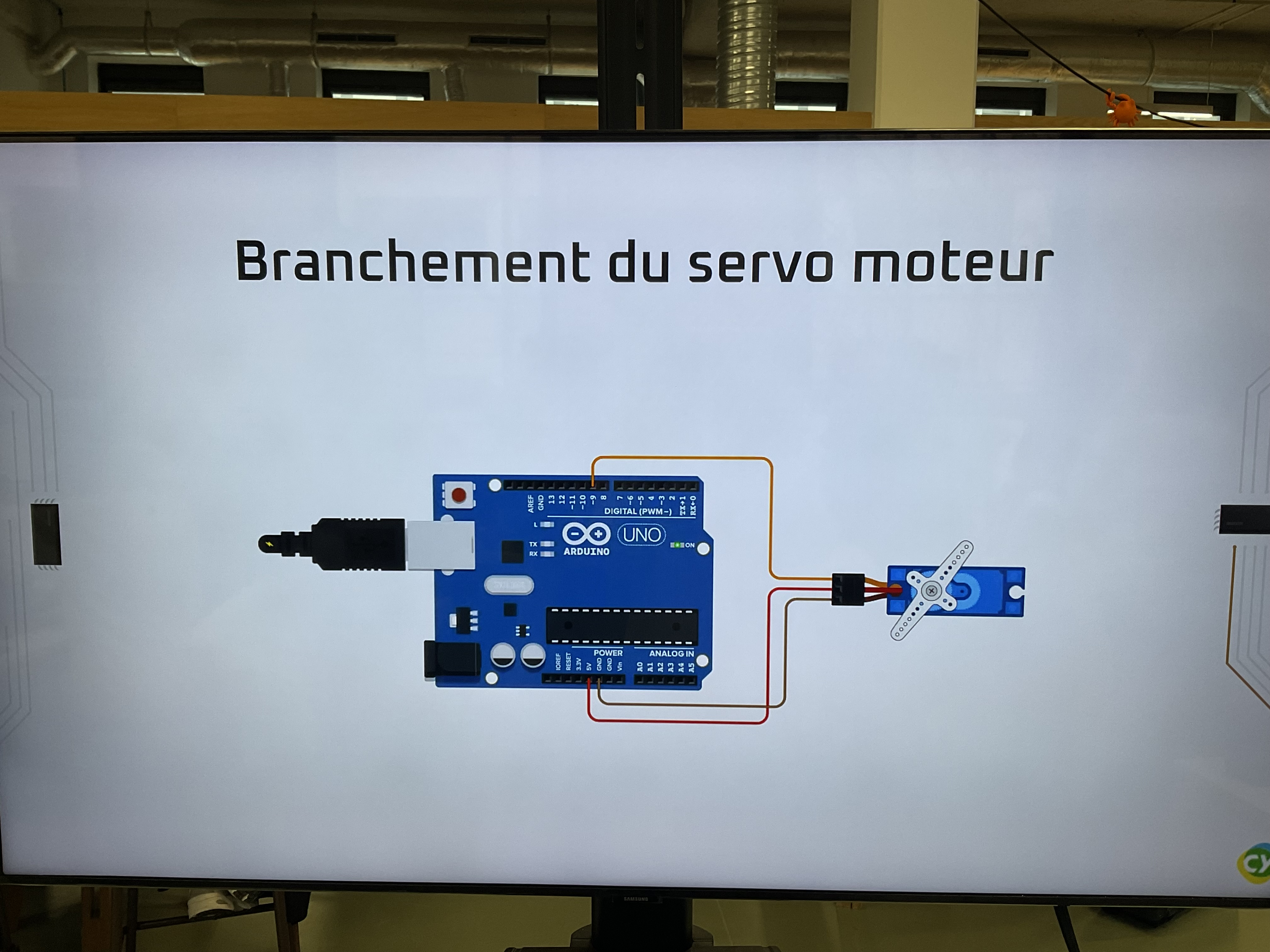
Sixième montage:
Branchement du cerveau moteur:
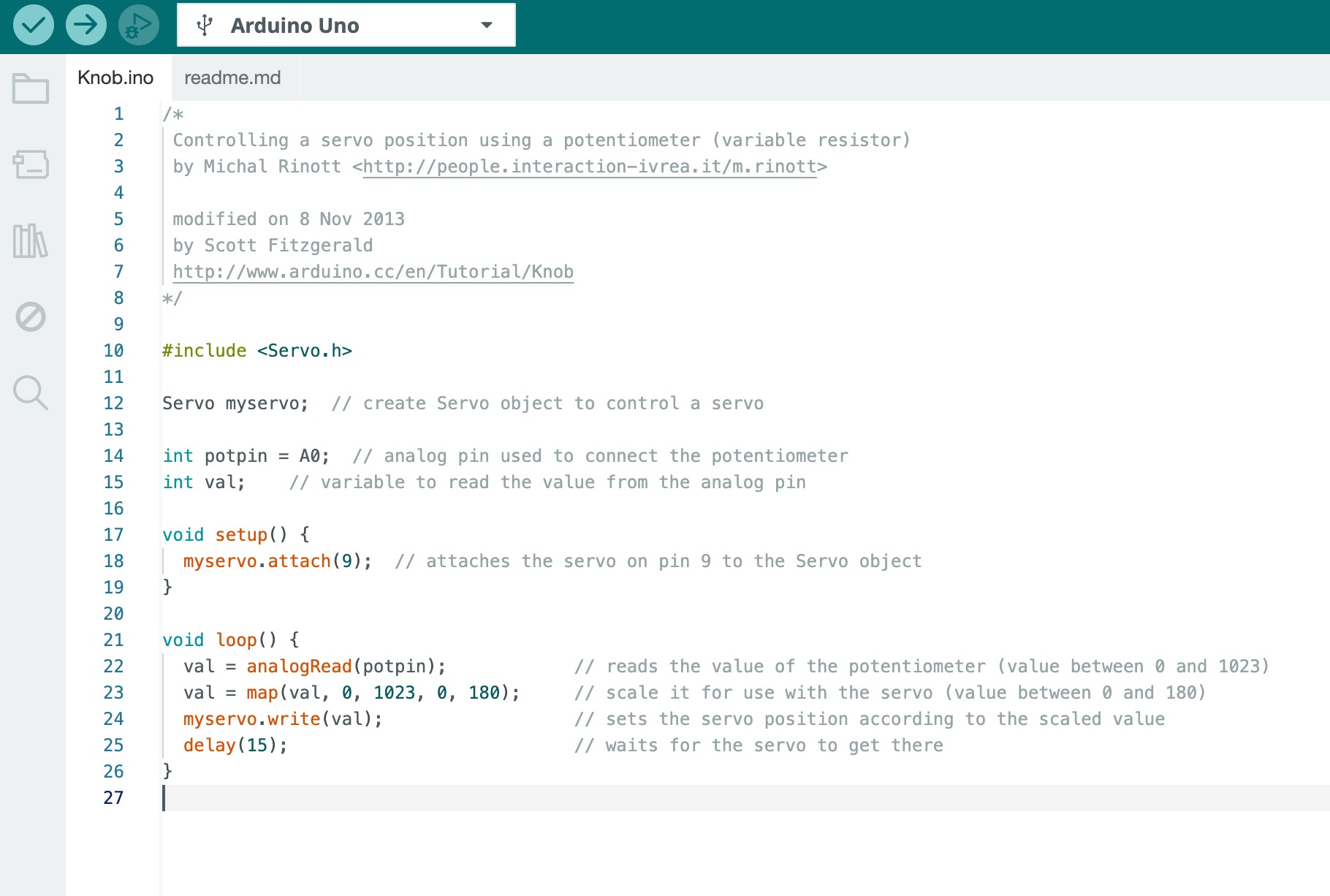
Code servant à faire bouger le servo moteur grâce au potentiomètre:
Code servant à faire bouger le servo moteur seul:

OBJECTIF POUR LE 03/03/25 :
=> Créer un code qui combine ce qu’on a vu aujourd’hui.
Ce qu’on veut faire: utiliser un capteur de température pour allumer une LED quand <23° et eteindre la LED puis activer le cerveau moteur quand >23°.
Voici ci-dessous le code à tester pour le premer devoir du 03/03/2025
#include "Seeed_SHT35.h"
#include <Servo.h>
#define LED 3 // Définition de la broche pour la LED
#define SERVO_PIN 9 // Définition de la broche pour le servomoteur
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SDAPIN 20
#define SCLPIN 21
#define RSTPIN 7
#define SERIAL SerialUSB
#else
#define SDAPIN A4
#define SCLPIN A5
#define RSTPIN 2
#define SERIAL Serial
#endif
SHT35 sensor(SCLPIN);
Servo myServo;
void setup() {
SERIAL.begin(115200);
delay(10);
SERIAL.println("Serial start!!");
if (sensor.init()) {
SERIAL.println("Sensor init failed!!");
}
pinMode(LED, OUTPUT); // Configuration de la LED en sortie
myServo.attach(SERVO_PIN); // Attachement du servomoteur à sa broche
delay(1000);
}
void loop() {
float temp, hum;
if (NO_ERROR != sensor.read_meas_data_single_shot(HIGH_REP_WITH_STRCH, &temp, &hum)) {
SERIAL.println("Read temp failed!!");
} else {
SERIAL.println("Read data :");
SERIAL.print("Temperature = ");
SERIAL.print(temp);
SERIAL.println(" ℃ ");
SERIAL.print("Humidity = ");
SERIAL.print(hum);
SERIAL.println(" % ");
// Allume la LED si la température est inférieure à 23°C, sinon active le servomoteur
if (temp < 23.0) {
digitalWrite(LED, HIGH);
myServo.write(0); // Position neutre du servomoteur
SERIAL.println("LED ON (Temp too low)");
} else {
digitalWrite(LED, LOW);
myServo.write(90); // Active le servomoteur à 90°
SERIAL.println("LED OFF, Servo Activated (Temp high)");
}
}
delay(1000);
}
Voici les détails et explication du code ci dessus :
"
Ce code est écrit en C++ pour Arduino et utilise un capteur de température et d'humidité SHT35, un servomoteur et une LED. Voici une explication détaillée :
1. Inclusion des bibliothèques
#include "Seeed_SHT35.h"
#include <Servo.h>
Seeed_SHT35.h: Bibliothèque pour gérer le capteur SHT35.Servo.h: Bibliothèque Arduino pour contrôler un servomoteur.
2. Définition des broches
#define LED 3 // La LED est connectée à la broche 3
#define SERVO_PIN 9 // Le servomoteur est connecté à la broche 9
- LED connectée à la broche 3.
- Servomoteur connecté à la broche 9.
3. Définition des broches I2C pour le capteur SHT35
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SDAPIN 20
#define SCLPIN 21
#define RSTPIN 7
#define SERIAL SerialUSB
#else
#define SDAPIN A4
#define SCLPIN A5
#define RSTPIN 2
#define SERIAL Serial
#endif
- Ces lignes définissent les broches SDA (données) et SCL (horloge) pour la communication I2C.
ARDUINO_SAMD_VARIANT_COMPLIANCEest utilisé pour vérifier si la carte est un microcontrôleur SAMD.- Si c'est une carte SAMD → SDA = 20, SCL = 21, RST = 7, communication via
SerialUSB. - Sinon (Arduino classique) → SDA = A4, SCL = A5, RST = 2, communication via
Serial.
- Si c'est une carte SAMD → SDA = 20, SCL = 21, RST = 7, communication via
4. Création des objets
SHT35 sensor(SCLPIN);
Servo myServo;
SHT35 sensor(SCLPIN);: Crée un objet pour le capteur SHT35, avec la brocheSCLPIN.Servo myServo;: Crée un objet pour le servomoteur.
5. Configuration initiale (setup)
void setup() {
SERIAL.begin(115200); // Initialise la communication série
delay(10);
SERIAL.println("Serial start!!");
if (sensor.init()) { // Initialise le capteur
SERIAL.println("Sensor init failed!!");
}
pinMode(LED, OUTPUT); // Configure la LED en sortie
myServo.attach(SERVO_PIN); // Attache le servomoteur à la broche 9
delay(1000);
}
- Initialise la communication série (
SerialouSerialUSB). - Initialise le capteur SHT35 (affiche un message si l'initialisation échoue).
- Configure la LED comme sortie.
- Attache le servomoteur à la broche définie (
SERVO_PIN).
6. Boucle principale (loop)
void loop() {
float temp, hum;
if (NO_ERROR != sensor.read_meas_data_single_shot(HIGH_REP_WITH_STRCH, &temp, &hum)) {
SERIAL.println("Read temp failed!!");
} else {
SERIAL.println("Read data :");
SERIAL.print("Temperature = ");
SERIAL.print(temp);
SERIAL.println(" ℃ ");
SERIAL.print("Humidity = ");
SERIAL.print(hum);
SERIAL.println(" % ");
- Déclare les variables
temp(température) ethum(humidité). - Lit les données du capteur
SHT35.- Si la lecture échoue → Affiche
"Read temp failed!!". - Sinon → Affiche la température et l'humidité dans le moniteur série.
- Si la lecture échoue → Affiche
7. Contrôle de la LED et du servomoteur
if (temp < 23.0) {
digitalWrite(LED, HIGH); // Allume la LED
myServo.write(0); // Place le servomoteur à 0°
SERIAL.println("LED ON (Temp too low)");
} else {
digitalWrite(LED, LOW); // Éteint la LED
myServo.write(90); // Fait tourner le servomoteur à 90°
SERIAL.println("LED OFF, Servo Activated (Temp high)");
}
- Si la température est inférieure à 23°C :
- Allume la LED.
- Place le servomoteur à 0°.
- Affiche
"LED ON (Temp too low)"dans le moniteur série.
- Sinon (température ≥ 23°C) :
- Éteint la LED.
- Tourne le servomoteur à 90°.
- Affiche
"LED OFF, Servo Activated (Temp high)".
8. Pause avant la prochaine mesure
}
delay(1000);
}
- Attend 1 seconde avant de recommencer la boucle.
Résumé du fonctionnement
-
Initialisation :
- Initialise la communication série.
- Initialise le capteur SHT35.
- Configure la LED et le servomoteur.
-
Lecture des données :
- Récupère la température et l'humidité.
-
Action selon la température :
- Si température < 23°C : Allume la LED, place le servomoteur à 0°.
- Si température ≥ 23°C : Éteint la LED, met le servomoteur à 90°.
-
Attente de 1 seconde avant de recommencer.
Application possible
Ce programme peut être utilisé pour :
- Une serre automatique (ouverture d'une trappe en fonction de la température).
- Un système de ventilation.
- Un mécanisme d’alerte avec une LED et un servomoteur."
No Comments