Groupe 1 : Melia, Maxime, Raul, Lucas, Mathieu, Ariane, Hind
PROJET ROB 3
Informations:
-
Membres et contact :
Ariane BONJOUR: charle-henri.bonjour@etu.sorbonne-universite.fr
Raul ABI KHALIL: raul.abi_khalil@etu.sne@etu.sorbonne-universite.fr
Maxime CARLIER: maxime.carlier@etu.sorbonne-universite.fr
Melia TAFAT: melia.tafat@etu.sorbonne-universite.fr
- POLYTECH Sorbonne ROB 3 2025-2026
- 12 février 2026-28mai 2026
Contexte et objectifs:
Dans le cadre de notre projet de Robotique de troisième année, nous avons du concevoir un robot capable de saisir un objet appelé totem et le déplacer de manière autonome au sein d'une arène de jeu.
L'enjeu majeur de ce projet est l'intégration de plusieurs domaines de l'ingénierie:
Conception Mécanique : L'architecture du robot repose sur un châssis simple conçu à l'aide de croquis à la main ainsi que de SolidWorks.
Électronique: afin de gérer la distribution d'énergie par une batterie 12V, la communication par bus CAN entre les composants, ainsi que l'utilisation des capteurs à ultrason à l'aide de ARDUINO MEGA.
Informatique: L'intelligence du robot est pilotée par un programme ARDUINO. Ce code, en langage C++,permet de gérer la navigation autonome, la détection du totem et l'exécution des trajectoires. Il assure également le traitement des données capteurs et la commande précise des moteurs KTECH et Dynamixel.
Matériel à disposition
- une pince 3551
- deux moteurs KTECH MS4015-V3
- un moteur Dynamixel
- deux petites roues et une roue pivotante ( de caddie)
- une carte Arduino MEGA, un shield SEED et un shield Dynamixel
- deux capteurs à distance ultrasons HC-SR04
- une batterie RS PRO 12V 1,2Ah
Avancée du projet:
Après s'être familiarisés avec le sujet, on se répartit les taches de la manière suivante :
- Chef de projet: Maxime CARLIER
- Responsable de l'électronique: Raul ABI KHALIL
- Responsables de l'informatique: Hind BENRADJA et Melia TAFAT
- Responsable de la mécanique: Lucas BRUGNONE
- Responsables du Wiki: Hind BENRADJA et Melia TAFAT
Nous avons par la suite réfléchi à différentes solutions possibles et avons opté, dans un premier temps, pour la solution suivante:
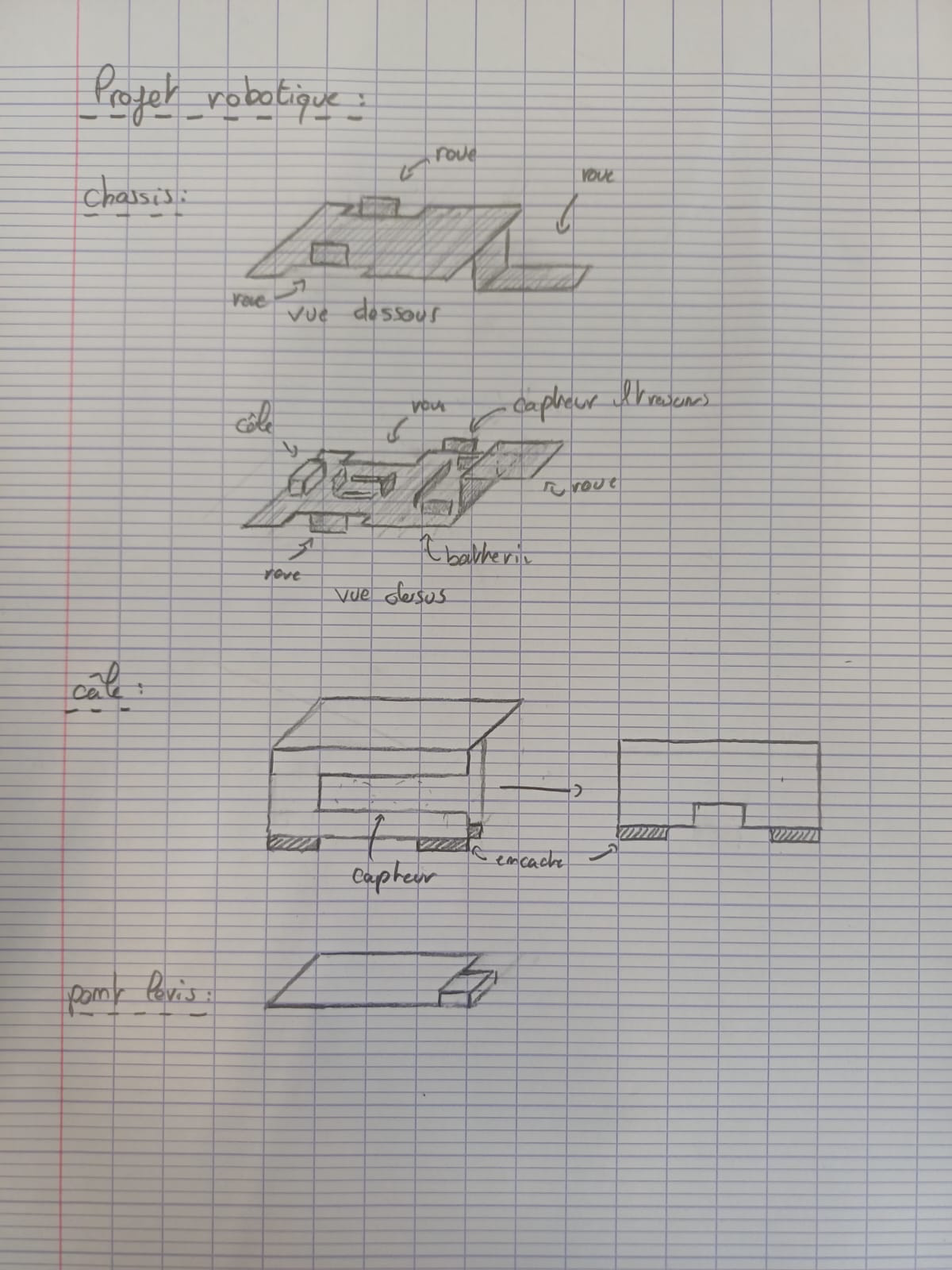
Figure 1: Modélisation de la première solution
On modélise un chassis avec des emplacements définis pour chaque composant, et on décide d'adopter pour une structure en escalier afin de fixer la roue pilotante à l'extrémité la plus haute, étant donné le fait qu'elle soit plus volumineuse que les autres roue, et de placer la pince sur une cale située à l'autre extrémité. Le mouvement de celle-ci sera piloté par un système de pont levis qui consiste à lever la cale à l'aide d'une corde qui s'enroulera.
Cependant, après réflexions, on se rend compte que cette première solution était inutilement complexe et présentait quelques inconvénients, comme le fait que la pince soit trop haute. On décide alors d'opter pour un chassis plus simple (figure 2), supprimant l'escalier et on résout le soucis de différence de taille des roues en plaçant simplement les petites roues à un niveau plus bas que la roue de pilotante. Pour la pince, on garde l'idée du mouvement du pont levis, que l'on modernise, en mettant en place une liaison pivot entre le chassis et une plaque en bois où l'on fixera la pince. Le principe reste donc le même que précédemment mais l'exécution est plus simple désormais.
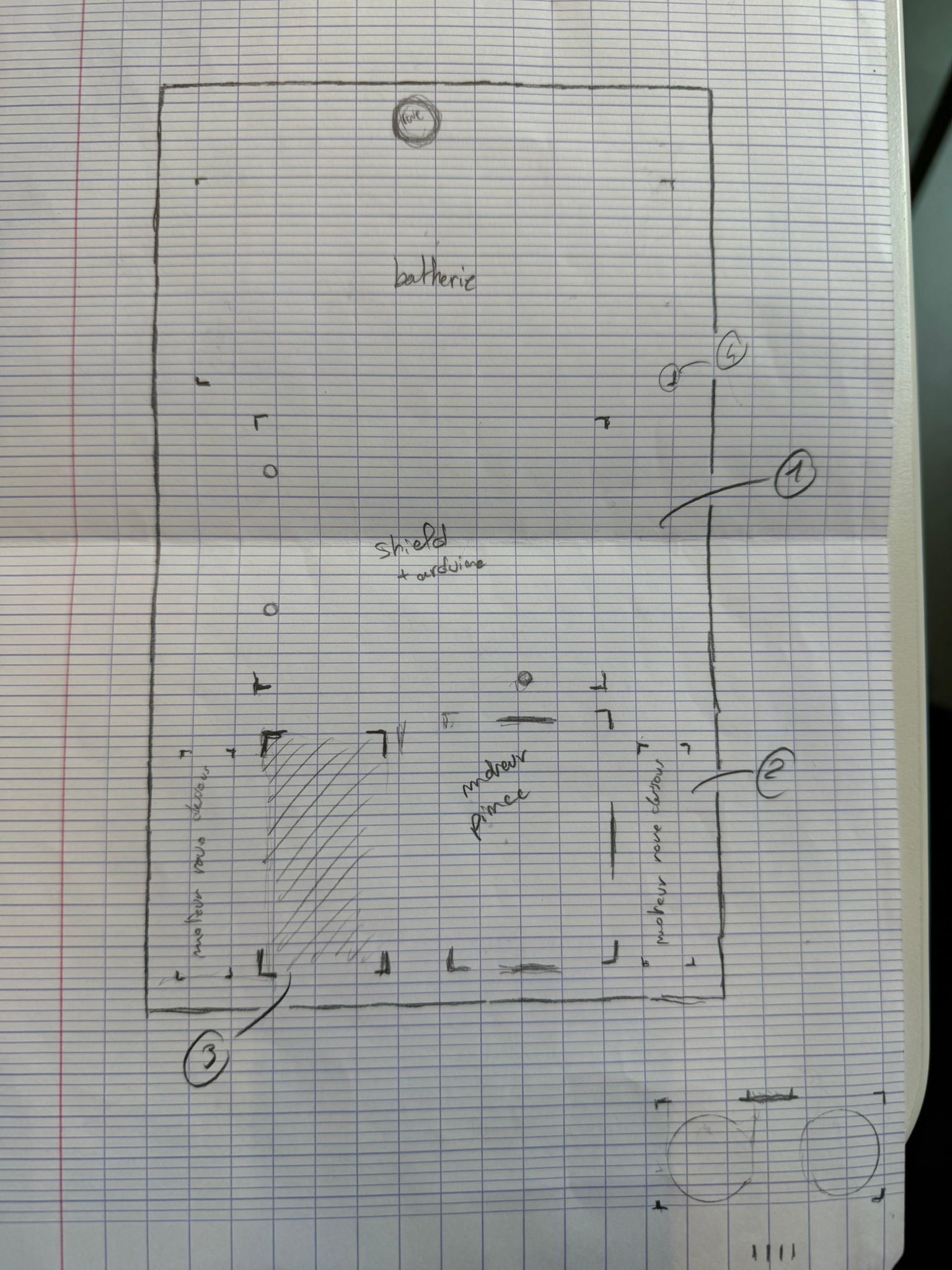
Figure 2: Modélisation du chassis final
Après avoir validé ce modèle, il est possible pour chaque membre de traiter les différents aspects du projet. Dans un premier temps, le responsable électronique vérifie le bon fonctionnement des composants en les câblant comme l'indique la documentation et en lançant le code Arduino donné (example.ino).
Pour la partie informatique, on réalise tout d'abord un organigramme afin de structurer la logique de l'algorithme avant de passer à la programmation.
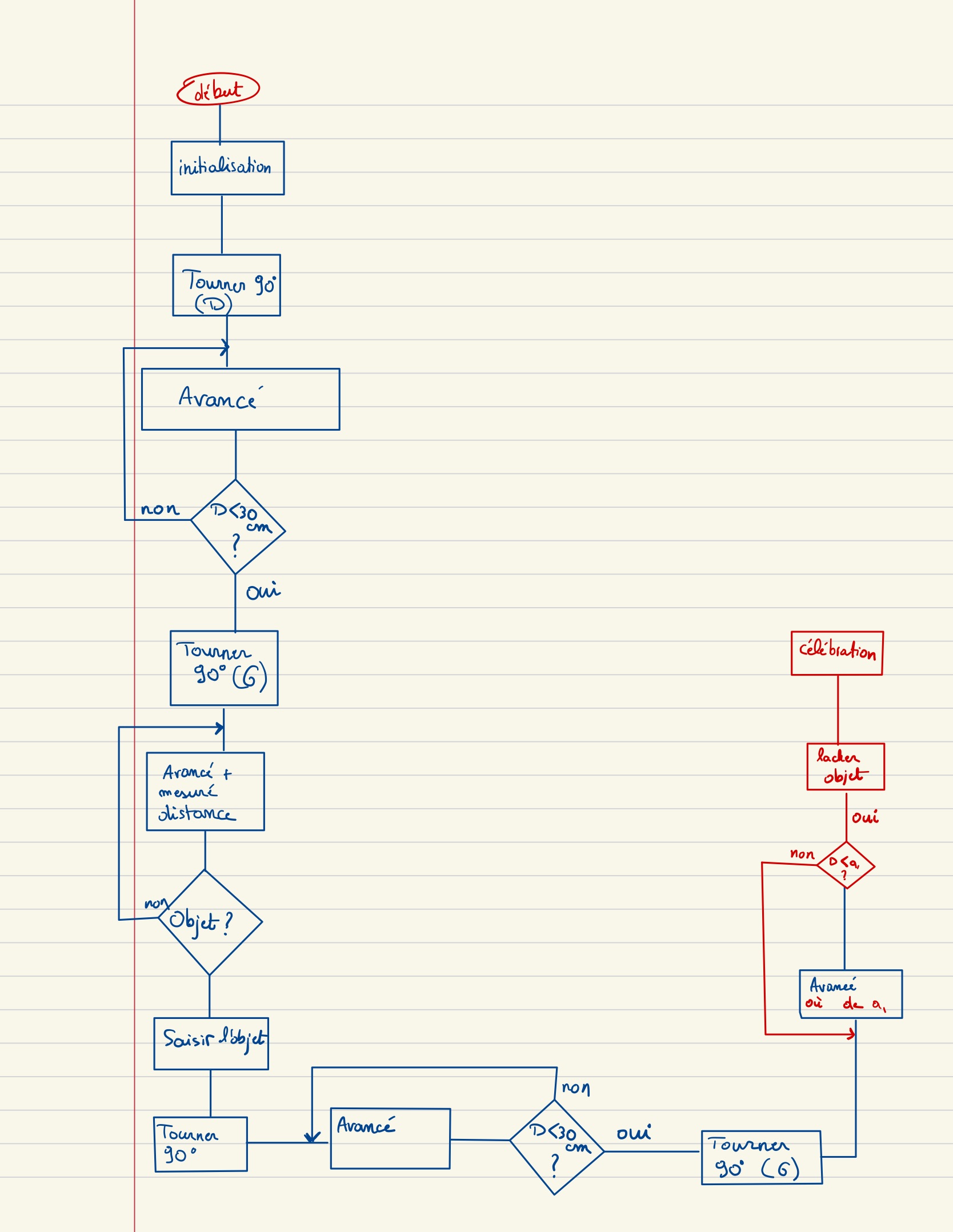
Figure 3: Organigramme du fonctionnement du robot
No Comments